محققان هاروارد روش جدیدی برای چاپ سهبعدی رباتیک نرم توسعه دادند
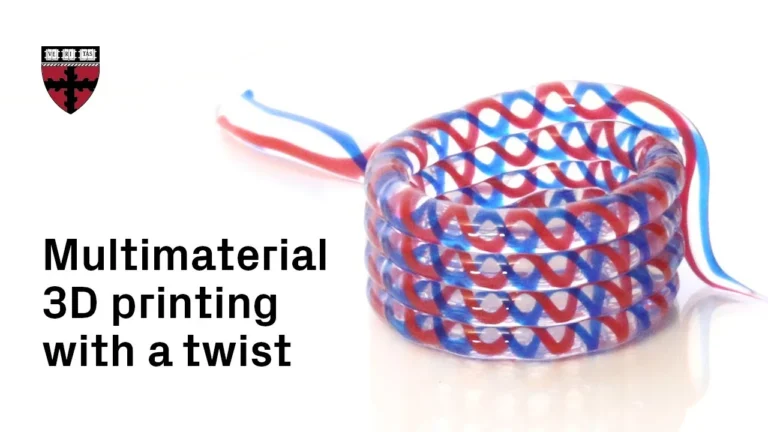
گروهی از مهندسان هاروارد موفق به دستیابی به نقطه عطفی جدید در زمینه چاپ سهبعدی و رباتیک نرم شدهاند. یک تکنیک جدید چاپ سهبعدی که توسط این تیم توسعه یافته است، امکان ایجاد ساختارهای سهبعدی کاملاً انعطافپذیر را فراهم میکند که میتوانند بنا به تقاضا پیچ خورده و تغییر شکل دهند.
این تکنیک جدید، که توسط دانشجوی سابق تحصیلات تکمیلی ناتالی لارسون و دانشجوی تحصیلات تکمیلی جکسون ویلت در دانشکده مهندسی و علوم کاربردی جان ای. پاولسون توسعه یافته است، چندین روش موجود را با هم ادغام کرده تا روش جدیدی به نام چاپ سهبعدی چرخشی چندمادهای را ایجاد کند. این تکنیک چندین ماده را از طریق یک نازل واحد چاپ میکند که در حین چاپ به طور مداوم در حال چرخش است.
این روش به تیم امکان میدهد تا با تنظیم طراحی نازل، سرعت چرخش و نرخ جریان، نحوه ترکیب مواد در ساختار را با دقت در حین چاپ تعیین کنند. لایه بیرونی قوی، که از پلیاورتان بادوام تشکیل شده است، از قسمت داخلی پولوکسامر محافظت میکند که به عنوان یک ماده پلیمری شبیه ژل مو توصیف شده است. پس از اتمام چاپ، ژل شسته میشود تا مجموعهای از لولههای توخالی باقی بماند که میتوانند برای عمل کردن به عنوان ماهیچه دستکاری شوند و با هوا یا مایع تحت فشار قرار گیرند تا به روشهای مختلف حرکت کنند.
پیچیدگی طراحی حتی امکان منطق حرکت داخلی را نیز فراهم میکند — ساختار را میتوان به گونهای طراحی کرد که به طور پیشفرض خم یا پیچ بخورد. به گفته ویلت، این کار با استفاده از دو ماده انجام میشود که میتوانند “چرخانده شوند تا جهت خم شدن ربات هنگام باد شدن برنامهریزی شود.” محققان برای نشان دادن موفقیت خود، از یک محرک مارپیچی گلمانند که هنگام باد شدن باز میشود، به همراه یک گیره شبیه دست با انگشتانی که میتوانند دور یک شیء بپیچند، استفاده کردند.
با فرض اینکه این فرآیند میتواند در مقیاس صنعتی مورد استفاده قرار گیرد، دو مزیت بزرگ برای این نوع طراحی چاپ سهبعدی برای رباتیک نرم وجود دارد: سرعت و سادگی. به طور سنتی، رباتهای نرم شامل ریختن مواد نرم در قالب و کپسولهسازی آنها با هم، لایه به لایه بودهاند. به جای تکیه بر این فرآیند زمانبر که به تعداد زیادی اجزای و بخشهای جداگانه نیاز دارد، یک چاپگر سهبعدی میتواند یک ساختار پیچیده و انعطافپذیر را در یک چاپ واحد تکمیل کرده و منطق حرکت را مستقیماً در آن برنامهریزی کند.
تلاشهای لارسون و ویلت میتواند به راحتی زمینه رباتیک را متحول کند و بر طیف وسیعی از صنایع تأثیر بگذارد — اگر بتوانند آن را عملی کنند. کار آنها که در مجله Advanced Materials منتشر شده است، اکنون تحت یک پتنت ثبت شده قرار دارد.
- کولبات
- بهمن 21, 1404
- 4 بازدید