اسکلت بیرونی کمک هدفگیری خانگی یک یوتیوبر، او را به رتبه دوم جدول امتیازات جهانی Aimlabs رساند
یک یوتیوبر با هدف بهبود چشمگیر امتیاز خود در برنامه آموزشی هدفگیری Aimlabs، یک اسکلت بیرونی پوشیدنی فیزیکی برای کمک به هدفگیری ساخت. این دستگاه از یک دوربین متصل، یک سیستم کامپیوتری داخلی Nvidia Jetson و مجموعهای از موتورها و سرووها استفاده میکند تا بازوی او را به صورت فیزیکی حرکت دهد و هدفگیریاش را در مواقعی که از هدف دور است، بهبود بخشد؛ نتایج واقعاً چشمگیر هستند.
ایمباتها از زمانی که صحنه رقابتی چندنفره در دهه ۱۹۹۰ ظهور کرد، مشکلی در بازیهای FPS بودهاند، اما معمولاً این مشکل شامل اصلاحات نرمافزاری است. به همین دلیل است که یک بازی موش و گربه بین سوءاستفادهکنندگانی که به دنبال تقلب هستند و توسعهدهندگانی که سعی در جلوگیری از آن دارند، وجود دارد.
اما شما نمیتوانید تقلب را در دنیای واقعی متوقف کنید، و همین امر باعث میشود که ساخته نیک “Basically Homeless” زتا، شبیه به Power Glove، بسیار جذاب و بالقوه تغییردهنده بازی باشد، به گونهای که توسعهدهندگان نمیتوانند کار زیادی در مورد آن انجام دهند. تا آنجا که به بازی مربوط میشود، او فقط واقعاً خوب است. شاید بیش از حد خوب، اما این تنها سرنخ است.
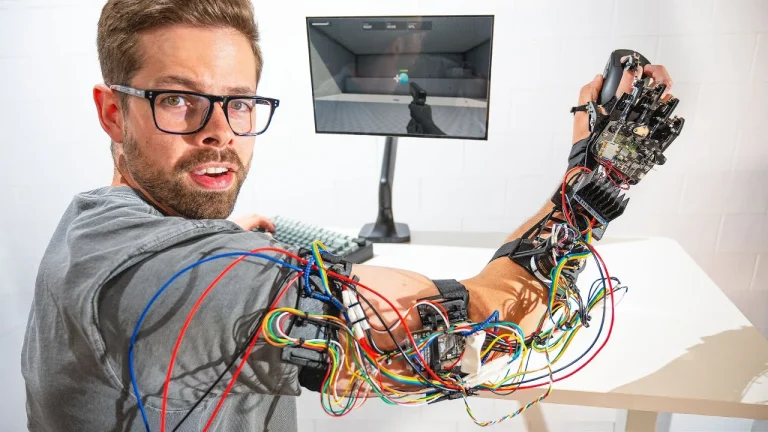
خود دستگاه فیزیکی یک ساخته هوشمندانه است که اجزای چاپ سهبعدی را با لولاها ترکیب میکند و به ساعد او متصل میشود، اما به انگشتان جداگانه نیز وصل شده و میتواند موقعیت دست، مچ و تمام انگشتان متصل را تنظیم کند. کنترلر موقعیت تمام این اجزای جداگانه بدن او را ردیابی میکند و آن را به چیزی تبدیل میکند که کامپیوتر میتواند ردیابی و درک کند و سپس در صورت نیاز آن را تغییر دهد.
این یک پروژه چند هفتهای بود. در طول مسیر با مشکلات و موانع زیادی روبرو شد، اما در نهایت زتا توانست آن را به کار اندازد.
با این حال، نکته جالب این بود که یک منحنی یادگیری وجود داشت. اولین نتیجه پس از آزمایش آن در حالت کاملاً عملیاتی، کاهش تقریباً ۲۰ درصدی امتیاز او نسبت به بازی بدون کمک بود. این به این دلیل بود که او باید یاد میگرفت که اجازه دهد دستیار کار خود را انجام دهد و مچ دست خود را به اندازه کافی شل کند تا حرکات اصلاحی انجام شود.
پس از آن، او توانست ۳ درصد امتیاز خود را نسبت به بالاترین امتیاز قبلیاش بهبود بخشد. این ممکن است نزدیک به حاشیه خطا به نظر برسد، اما زتا امتیاز اصلی خود را قبل از شروع تنظیم کرده بود، بنابراین این جهش قابل توجه بود.
آیا میتوانست بهتر باشد؟ معلوم شد که میتوانست. با تمرکز بر کاهش تأخیر دوربین و بخش ترجمه تصویر فرآیند، او زمان واکنش را از حدود ۵۰ میلیثانیه (از دوربین به بازو) به تنها ۱۷ میلیثانیه کاهش داد!
او همچنین ولتاژ موتورها را افزایش داد تا آنها قویتر شوند و بتوانند او و انگشتانش را حتی اگر کمی مقاومت میکرد، مانور دهند و نتایج واقعاً چشمگیر بود. اولین اجرای او ۱۲ درصد بهبود، سپس ۲۸ درصد بهبود در اجرای دیگر، سپس ۴۳ درصد و سپس ۶۳ درصد افزایش را نشان داد – که او را به جایگاه دوم در جدول امتیازات جهانی رساند.
مطمئناً، این تقلب است، اما با این حال یک پروژه چشمگیر است. همانطور که او در نتیجهگیری خود پیشنهاد میکند، با ترکیب برخی عناصر عصبی-عضلانی، این میتواند حتی بهتر شود. این تقریباً مطمئناً پروژه بعدی او خواهد بود.
- کولبات
- مهر 4, 1404
- 79 بازدید